




- In a star connection, similar points (start or end points) of three coils (that is, U1, V1, and W1 or U2, V2, and W2) are connected together to form a neutral point and three wires run from the remaining three terminals. In delta, the end point of each coil is connected to the starting point of another coil to form a closed loop and three wires are taken out from the coil joints.
- A star connection has a neutral point while a delta connection has no neutral point.
- In a star connection, the phase voltage is 1/√3 line voltage. In delta, phase voltage is equal to line voltage.
- The speed of a star-connected motor is slow because it receives 1/√3 of line voltage while the speed of a delta-connected motor is fast because each phase gets the total line voltage.
- A star connection is commonly used in power transmission while a delta connection is common in power distribution and industries.
A DOL (direct on line) starter is a method for starting a three-phase induction motor. It can also be referred to as an across the line starter. It is the simplest type of starter, which connects the three-phase motor directly to the power supply through a contactor. A DOL starter consists of a circuit breaker, contactor, overload relay, and push buttons (NO and NC push buttons).
A DC motor is a type of electric motor that is powered by DC, supplied by a battery or a DC source.
We will be looking at the two types of DC motor:
• Brushed DC motor
• Brushless DC motor
Brushed DC motors are used for simple control systems. They consist of a stator, rotor, commutator, brushes (usually made of carbon), and so on. A magnetic field is produced by passing a current through the commutator and the brush connected to the rotor. One of the drawbacks of a brush motor is the wear and tear of brushes.
Types of brushed DC motor include the following:
• Permanent magnet
• Series wound
• Shunt wound
• Compound wound
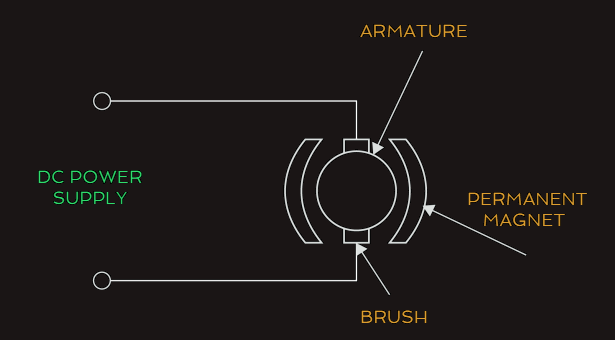
Permanent magnet DC motor does not have a field winding on the stator, rather, it uses a permanent magnet to create the magnetic field of the stator, which the rotor field reacts with to produce the turning force that causes rotation. 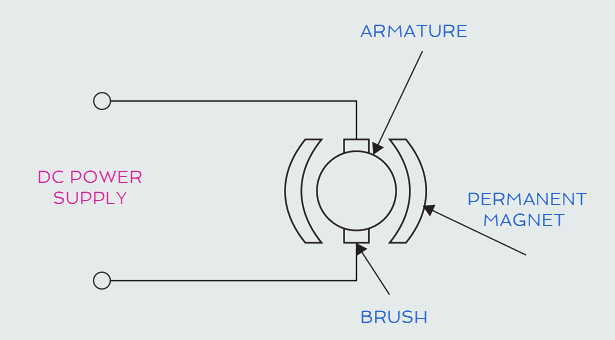
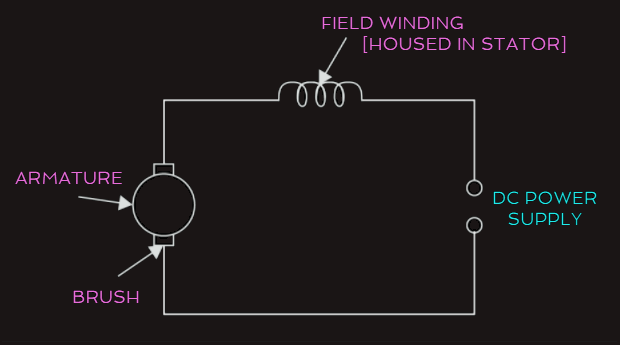
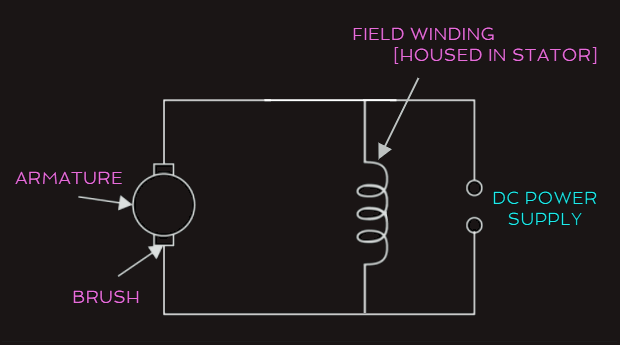
 Series wound DC motor has the field winding (housed in the stator) in series with the armature winding. The field winding is powered by a DC supply. The same amount of current flows through the field winding and the armature winding since they are in series. As current flows through the field winding and armature winding, strong magnetic fields are produced. The interaction between the magnetic field in the field winding and the armature winding produce the turning force (torque) that creates rotation.
Series wound DC motor has the field winding (housed in the stator) in series with the armature winding. The field winding is powered by a DC supply. The same amount of current flows through the field winding and the armature winding since they are in series. As current flows through the field winding and armature winding, strong magnetic fields are produced. The interaction between the magnetic field in the field winding and the armature winding produce the turning force (torque) that creates rotation. 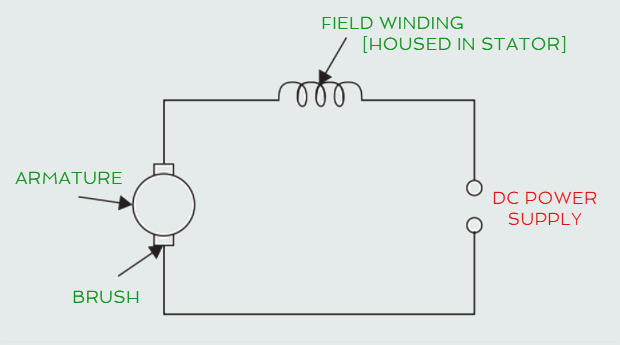
 Shunt DC motor has the field winding (housed in the stator) in parallel with the armature winding. It is powered by DC and the total current splits into two parallel paths to supply the field winding and the armature winding. As the current flows through the stator and armature winding, a magnetic field is produced. The interaction between the magnetic fields of the stator and rotor produce the turning force that creates rotation.
Shunt DC motor has the field winding (housed in the stator) in parallel with the armature winding. It is powered by DC and the total current splits into two parallel paths to supply the field winding and the armature winding. As the current flows through the stator and armature winding, a magnetic field is produced. The interaction between the magnetic fields of the stator and rotor produce the turning force that creates rotation. 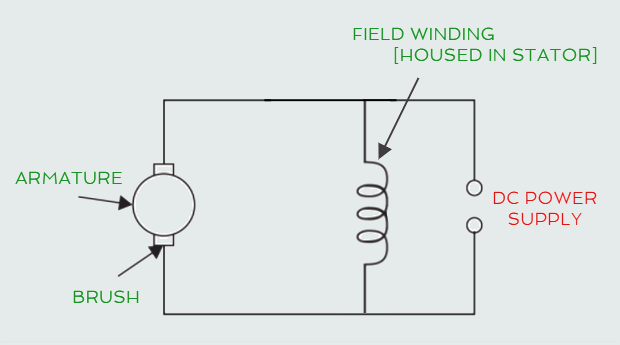
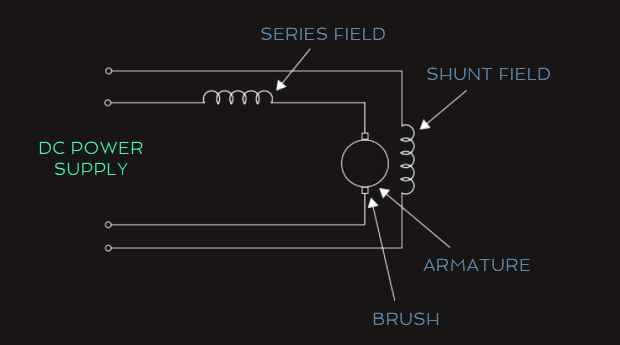
 Compound wound DC motor has the field winding (housed in the stator) in series with the armature winding and a shunt field that is excited separately. The shunt field winding is connected across the field supply and the series field winding is connected in series with the armature. When DC is supplied, both the shunt field winding and the series field winding produce the required magnetic field that interacts with the armature to produce the necessary turning force that creates rotation. Compound wound DC motor has the characteristics of both the series and shunt types of DC motor.
Compound wound DC motor has the field winding (housed in the stator) in series with the armature winding and a shunt field that is excited separately. The shunt field winding is connected across the field supply and the series field winding is connected in series with the armature. When DC is supplied, both the shunt field winding and the series field winding produce the required magnetic field that interacts with the armature to produce the necessary turning force that creates rotation. Compound wound DC motor has the characteristics of both the series and shunt types of DC motor. 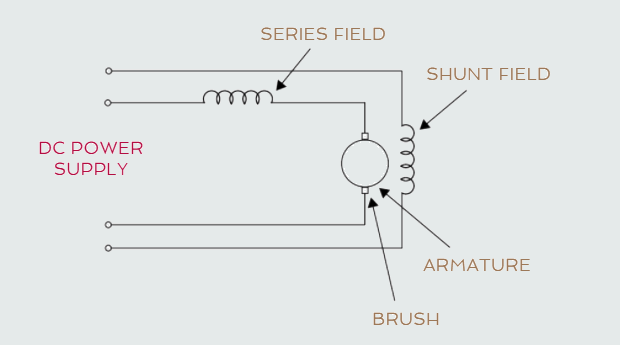
 In a brushless DC motors the stator (armature) consists of windings of coil through which current is passed to produce a magnetic field. The rotor is made of a permanent magnet unlike the brushed type. When a DC power is applied to the stator, it becomes an electromagnet. The force and reaction between the permanent magnet in the rotor and the electromagnet created in the stator produces the required rotation. A common example of a brushless DC motor is the type used in the fan of a computer power supply, for example.
In a brushless DC motors the stator (armature) consists of windings of coil through which current is passed to produce a magnetic field. The rotor is made of a permanent magnet unlike the brushed type. When a DC power is applied to the stator, it becomes an electromagnet. The force and reaction between the permanent magnet in the rotor and the electromagnet created in the stator produces the required rotation. A common example of a brushless DC motor is the type used in the fan of a computer power supply, for example.
Stepper motor
A stepper motor can be referred to as a type of brushless DC motor that divides its full rotation into a number of equal steps and rotates in steps. They have multiple coils organized in phases. The motor will rotate a step at a time as each phase is energized in sequence. Basically, we divide them into two types: unipolar and bipolar.
While unipolar usually has six wires, but sometimes five, bipolar stepper motor usually have four wires. Unipolar stepper motors have one winding with a center tap per phase, bipolar also have one winding per phase but do not have a center tap. They have more torque and are more efficient than unipolar stepper motors.
Unlike a regular brushed DC motor that can be connected directly to a DC source, driving a stepper motor is more complicated. It usually requires a stepper motor driver or stepper motor controller to energize the phases in a timely sequence to get it turned. 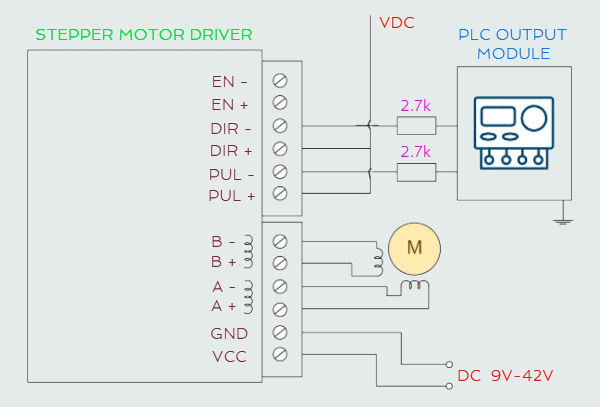
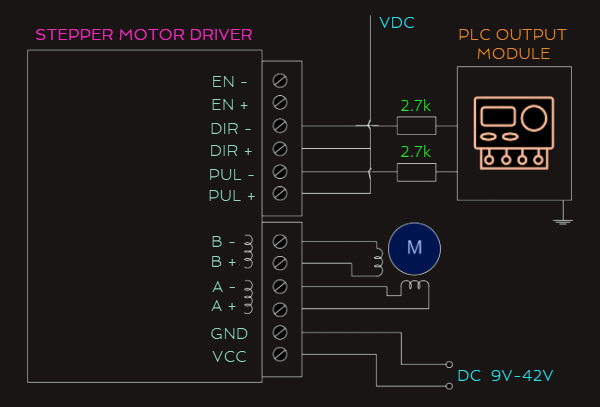 The four leads or wires of the stepper motor are connected to terminals A+, A-, B+, and B- and the power supply is connected to VCC and GND. DIR +, DIR -, PUL +, and PUL - can be connected to a PLC to send the pulse and direction signal.
The four leads or wires of the stepper motor are connected to terminals A+, A-, B+, and B- and the power supply is connected to VCC and GND. DIR +, DIR -, PUL +, and PUL - can be connected to a PLC to send the pulse and direction signal.
Servo motor
Servo motors are specially designed for use in a feedback control system. They allow for a precise angular position, velocity and acceleration. They contain a regular motor in addition to a feedback mechanism or encoder. The feedback allows the control system to establish whether the object being monitored is correctly positioned and allows actions to be taken based on the movement and position of the object. Both the AC and DC types of servo motors are used for industrial control. A servo motor is also not simple to control like a DC motor that can just be connected to a DC source. A basic DC servo motor can be controlled with a microcontroller. AC servo motors used in industry usually require a PLC and a servo amplifier (driver). Unlike the basic DC motor that only needs to be connected to a DC source to get it running, stepper motors and servo motors require a driver to get them running. They are very useful in the field of robotics and industrial automation.