




Figuring out IP address components - 6 steps
When we are given some particular address and subnet mask, and we need to find out whether the address is a network, host or directed broadcast address, here is the 6-step procedure:
- We need an IP address and subnet mask.
- Examine the subnet mask and find the interesting octet. The interesting octet in the mask is the the one where the network and host boundary is found. This includes the following mask values in an octet: 0, 128, 192, 224, 240, 248, 252 and 254; it doesn't include 255 because 255 indicates that this octet is a part of the network number [all 8 bits are 1s]. Only when an octet contains 0s it has a host component /remember contiguous 1s and 0s.
- Subtract the interesting octet from 256. This will give you an increment by which network numbers are increasing in the interesting octet.
- Now, start writing down the network numbers, starting with the first subnet (0) and work your way up to a network number that is higher than the address in question.
- Beside each of these network numbers, write their corresponding directed broadcast addresses (one number less than the next network number), especially for the networks that are near the network number in question - you don't need to do this for all.
- Between the network and broadcast addresses, write down the host addresses.
Example:
We have been given an IP address 192.168.1.37 and subnet mask 255.255.255.224 (192.168.1.37/27) and we need to find out what kind of address it is.
So, in the first step, we have above addresses and IP belongs to Class C network.
The interesting octet is 4th octet with value of 224.
When we subtract 224 from 256, we get 32, which is an increment in the interesting octet [there are 32 addresses in each network].
Here is a list of network numbers for our example: 192.168.1.0, 192.168.1.32, 192.168.1.64, 192.168.1.96, 192.168.1.128, 192.168.1.160, 192.168.1.192 and 192.168.1.224 [8 subnets in this example, 256 / 32 = 8].
Directed broadcast addresses are: 192.168.1.31, 192.168.1.63, 192.168.1.95, 192.168.1.127, 192.168.1.159, 192.168.1.191, 192.168.1.223 and 192.168.1.255.
We are searching for 192.168.1.37 address. It is in the second network, between 192.168.1.33 - 192.168.1.62, so this address is a host address.
Industrial automation
Industrial automation is where computers, robots, and other control devices are used to operate machines and equipment that's used in manufacturing or processing plant with little human intervention. A set of sequential operations are established in a factory where components are assembled to make a product or where materials are put through a refining process to produce an end product that is suitable for consumption (a production line or assembly line). This usually consists of machines and tools that need to be operated to get the finished product. Before industrial automation, items were hand-made by individual craftsmen and women and it could take hours or days to manufacture a single item. Industrial automation is a complex system with several devices communicating and working with each other to provide the desired result. The simplest way to describe the levels/hierarchy of industrial automation is by using a three-level representation:
1. Field level
2. Control level
3. Supervisory and production level 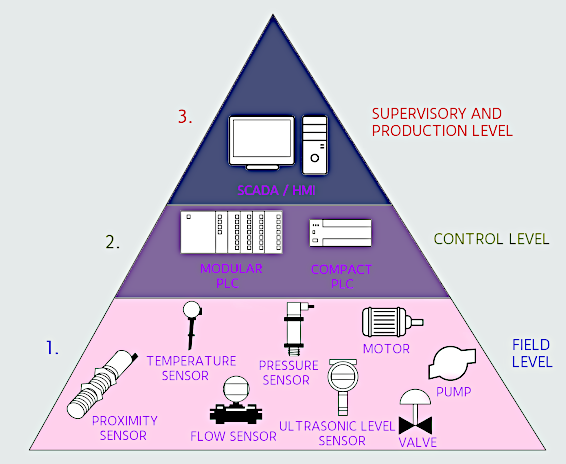
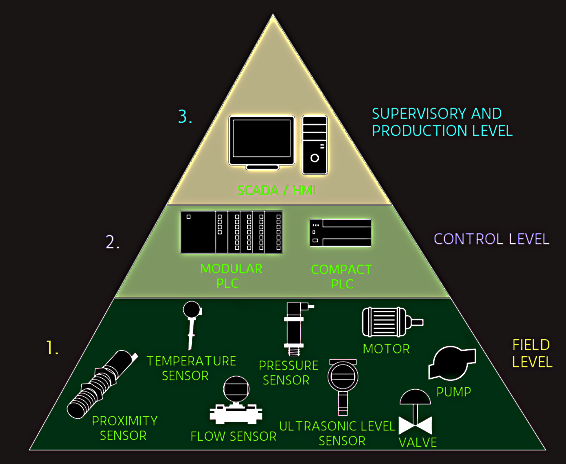
Field level is the lowest level in the hierarchy of industrial automation. It consists of field devices such as sensors and actuators, which are used in industrial automation. Sensors convert physical characteristics into electrical signals (digital or analog). They are input devices and can be referred to as the eyes and ears of automation. Examples of sensors include proximity sensors, temperature sensors, pressure sensors, level sensors, flow sensors, and limit switches.
Actuators, on the other hand, convert electrical signals (digital or analog output signals) into physical characteristics, which can be in the form of motion. Examples include AC/DC motors, servo motors, stepper motors, pumps, control valves, solenoids, contactors, and relays.
The job of the field devices (sensors and actuators) is to transfer machine and process data to the next level (control level) for monitoring and analysis. This level can be referred to as the eyes and arms (hands) of an industrial automation system. The sensor is acting as the eyes, while the actuator is acting as the arms. Real-time process parameters such as temperature, pressure, level, and flow are converted into electrical signals by the sensors. Data that's collected from the sensors is transferred to the controller for further monitoring and analysis. The actuators control the process parameter through a signal from the controller.
Control level consists of programmable logic controllers (PLCs) or other forms of controllers. PLCs are the brains behind modern industrial automation. They are used to carry out control functions in industries. They take data from different kinds of sensors, make decisions using the program written into it, and output a control signal that the actuator will use to carry out the required task. They can be programmed to deliver automatic control functions based on the signals they receive from sensors.
Supervisory and production level consists of Supervisory Control And Data Acquisition (SCADA) and Human Machine Interface (HMI), among others, for monitoring and controlling various parameters and setting production targets.
Switches and Sensors
Switches and sensors provide information about the environment for a controller to process. The result of processing determines the actions that will be carried out by an actuator. Just like sight, hearing, touch, and smell are important for humans to function, switches and sensors are important components that are required to automate an industrial process.
A switch is an electrical component that connects or disconnects a signal path in an electrical circuit. It is used to make or break an electrical circuit. A switch has two states: an ON state and an OFF state. In an electrical circuit, the current will flow when the switch is in the ON state. When in the OFF state, the current will not flow. Hence, the ON state will connect a signal path, while the OFF state will disconnect a signal path. A switch can be referred to as a device that's used to turn equipment ON or OFF.
Switches can be categorized as follows:
1. Manually operated switch - operated by hand (push button, rocker switch, toggle switch, slide switch, selector switch, knife switch)
2. Mechanically operated switch - controlled automatically by factors such as pressure, position, or temperature (limit switch, level switch, pressure switch, temperature switch)
Sensors are devices that detect or sense the presence or absence of objects. A sensor can be thought of as an automatic switch. They gather information from their environment and convert it into a form of signal that can be read and/or seen by an observer or equipment. In a human being, their eyes, nose, ears, tongue, and skin can be referred to as sensors. In automation, various types of sensors detect various physical quantities such as light, sound, temperature, and so on. These physical quantities will be converted into a digital or analog signal that can be read and/or seen by an observer or piece of equipment i.e. controller.
Proximity sensors detect the presence or absence of objects using electromagnetic fields, light, or sound.
There are various types, each suited to a specific environment or application:
• Inductive proximity sensors
• Capacitive proximity sensors
• Photoelectric proximity sensors
An inductive proximity sensor consists of a coil, oscillator, detection circuit, and output. The oscillator provides an oscillating magnetic field that radiates around the winding of the coil, which is located at the sensor's surface. When a ferrous metal gets near the magnetic field, a small current (eddy current) is induced on the metal's surface. This small current changes the natural frequency of the magnetic circuit, which, in turn, reduces the oscillating amplitude. The detection circuit monitors the amplitude of the oscillation and triggers an output from the output circuitry when the oscillation becomes reduced to a sufficient level.
Capacitive sensors act like capacitors. They make use of the electrical properties of capacitance and the change of capacitance based on a change in the electrical field around the active face of the sensor. A metal plate in the sensing face of the sensor acts as the first plate of a capacitor, and it's electrically connected to an internal oscillator circuit. The object to be sensed acts as the second plate of the capacitor. The external capacitance between the target and the internal sensor plate forms a part of the feedback capacitance in the oscillator's circuit. As the target approaches the sensor's face, the oscillations increase until they reach a threshold level and activate the output.
A photoelectric sensor consists of a light emitter (sender), photoreceiver, and supporting circuitry. They are used to detect the presence or absence of objects by using a light emitter and a receiver. The emitter transmits a beam of either visible or invisible light to the detecting receiver. There are three types of photoelectric sensors:
1. Through beam: With this sensor, the emitter (sender) and the receiver are in a separate housing and positioned to face each other. The sender provides a constant beam of light; detection occurs when an object passing in-between the sender and receiver breaks the beam.
2. Retro-reflective: The operation of a retro-reflective sensor is like that of a through beam. Here, the sender and receiver are in the same housing facing the same direction, unlike the through beam. The emitter produces a light beam and projects it toward a reflector, which then deflects the beam back to the receiver. Detection occurs when the light path is disturbed or broken.
3. Diffused reflective: With this sensor, the emitter and the receiver are in the same housing and facing the same direction. The emitter sends out a constant beam of light that diffuses in all directions, filling a detection area. When a target object enters the area, it deflects part of the beam back to the receiver. The target acts as the reflector. Detection occurs when light is reflected off the disturbance (or target) object.